|
|

|
Features: According to the mathematical equations listed below, rotation angle can be calculated precisely.
Date Calculate:
X1 Axis:δX1= tanθ * (Y-X1y)+X1x * (-1+1/cosθ)+X X2 Axis:δX2= tanθ * (Y-X2y)+X2x * (-1+1/cosθ)+X Y Axis:δY = tanθ * (Yx+Yy * sinθ-X) +Yy * (cosθ-1)+Y
δX1:X1 Axis relative movement (mm) } δX2:X2 Axis relative movement (mm) }(movement driven by ball screw) δY :Y Axis relative movement (mm) }
X1x、X1y:Coordinate position of pivot on X1 Axis X2x、X2y:Coordinate position of pivot on X2 Axis Yx 、Yy :Coordinate position of pivot on Y Axis
X :X Axis movement Y :Y Axis movement θ:θAxis movement |
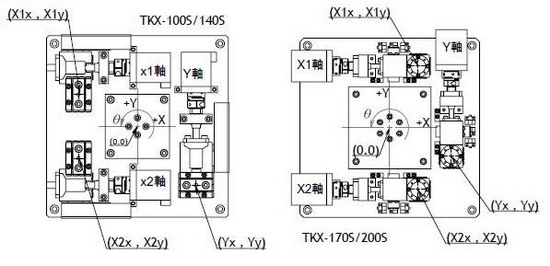
| Type | X1x | X1y | X2x | X2y | Yx | Yy |
| TKX-100S | -46 | 15.5 | -46 | -15.5 | 41 | -37.5 |
| TKX-140S | -55 | 30 | -55 | -30 | 55 | -55 |
| TKX-170S | 29.5 | 67.5 | 29.5 | -67.5 | 67.5 | -29.5 |
| TKX-200S | 38 | 82.5 | 38 | -82.5 | 82.5 | -38 |